7.5. Scope view#
TwinCAT上で制御するモーションデバイスの稼働状態を監視するには、Scope viewというソフトウェアが必要です。このソフトウェアでは、モーションに対する様々なデータの時系列データを可視化し、様々な分析を行うことができます。
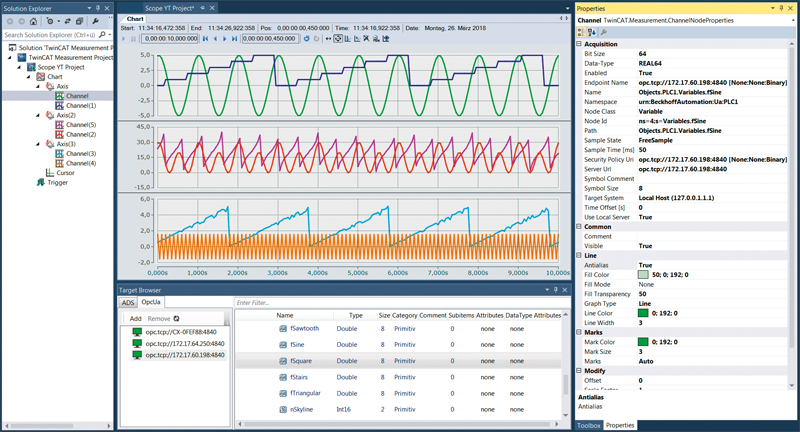
図 7.2 TE1300 Scope viewの画面#
このソフトウェアで可視化するために収集したデータは、CSVなどの汎用的なファイル形式にエクスポートすることができます。また、PLC、NC、CNCなどのモーションデバイスのメモリ条件[1]によって自動的にCSVファイルへ出力することもできます。本書ではその方法について示します。