TE1111によるシミュレーションとテスト#
TE1111は、EtherCATを介して仮想的な制御対象ロジックを実行するTwinCATプロジェクトです。図 3.21や図 3.22の通り専用のシミュレーションIPCをEthernetケーブルで接続する方法や、1台のIPC内で、複数のEthernetポート同士を接続することで、EtherCAT通信が可能となります。EtherCATのスレーブ情報は、制御コントローラ側からENIファイルをエクスポートし、シミュレータにインポートすることで、CoE/SDOデータを交換してOPに移行させられます。その後、プロセスデータを通してシミュレーションロジック側で定義したTwinCATの各種モジュールにて、制御対象の振る舞いをシミュレーションすることができます。
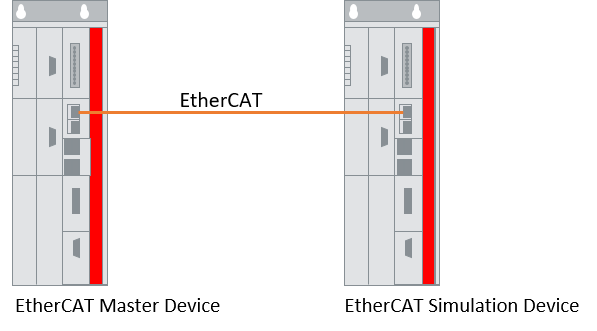
図 3.21 シミュレーション専用マシンがある場合の接続形態#
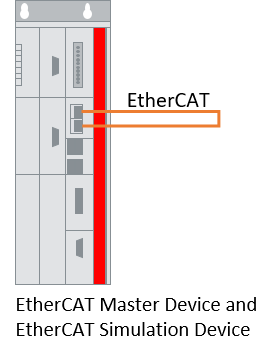
図 3.22 IPC1台で制御プロジェクトとシミュレーションプロジェクトが混在する接続形態#
シミュレーション側でさらなるEtherCATポートを用いる事で図 3.23のとおり実ターミナル混在のシミュレーション環境も構築いただく事が可能です。
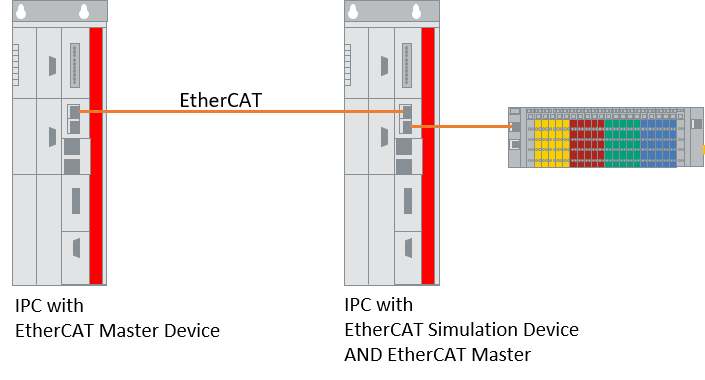
図 3.23 実I/Oを活用したシミュレーション接続構成#
本章では、図 3.24の制御対象図の通り、一般的なエアシリンダをクローズドセンター電磁弁を使って制御を行うソフトウェアと、そのシミュレーションロジックを構築します。
プロジェクト、および、IPCは、図 3.22の構成の通り、1台のIPCを使ってエアシリンダの制御プログラムとそのシミュレーションロジックが同一のIPC内に同居する方法(図 3.25)で様々なテストを実施する手法をご紹介します。
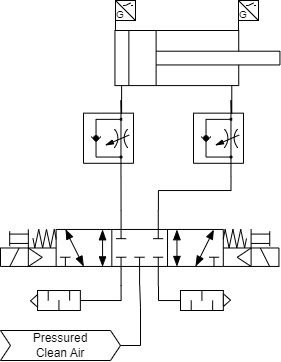
図 3.24 制御対象図#
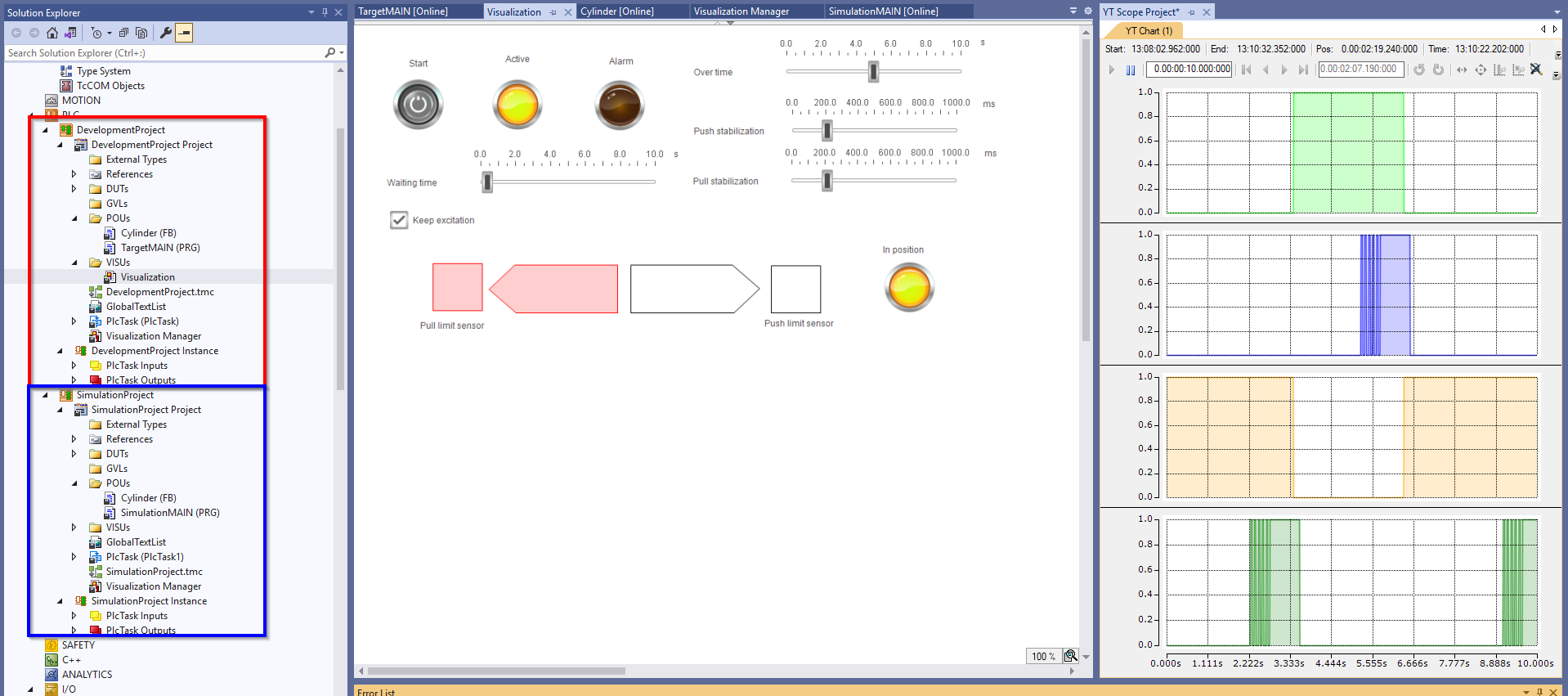
図 3.25 PLCプロジェクトの構成#