1.8. PLCからのSDOデータアクセス#
EtherCATサブデバイスとメインデバイスの間で行われる通信データには、周期パケットによりデータ交換が行われるプロセスデータオブジェクト(PDO)と、メインデバイスからのハンドシェーク方式であるMaibox通信によるデータ交換が行われるサービスデータオブジェクト(SDO)の2種類があります。
いずれもCANopen over EtherCAT(CoE)と呼ばれるCANopenの規格に従ったデータフォーマット規約のオブジェクトディクショナリ(OD)に準じてPDO・SDOデータが構成され、EtherCAT上でデータ交換できます。
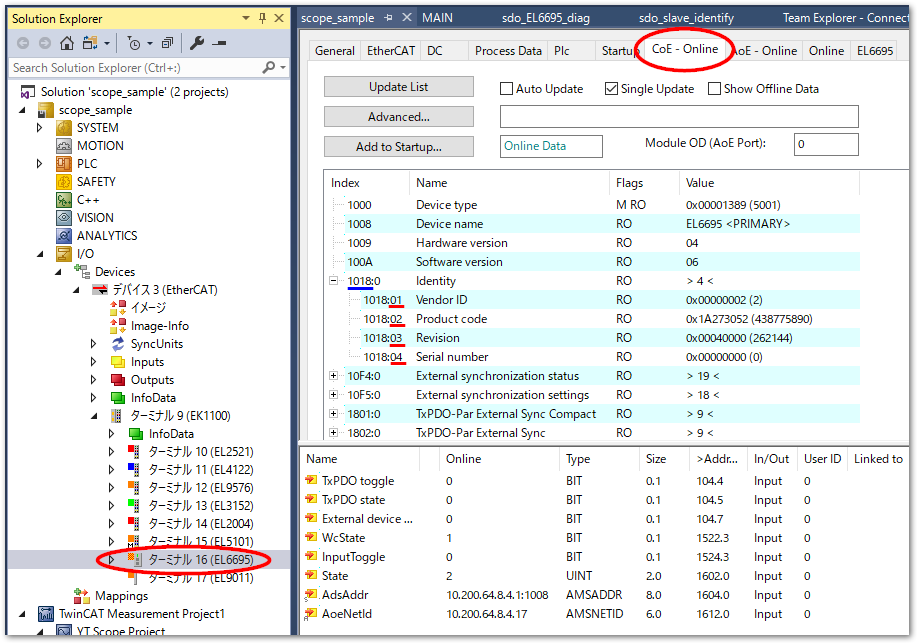
TwinCAT上では、任意のサブターミナルを選択したあと、CoE - OnlineタブからODを一覧することができます。
CoEのODは、青下線で示したIndexと、赤下線で示したSubindexという階層構造で一覧構成されます。
サブデバイスの仕様により異なりますが、PDOデータは、このODの任意のIndexを選択してマッピングして構成することができます。構成設定を行った後、サブデバイスがOP状態になるとマッピングされたIndexのODのデータグラムによる周期通信が行われます。
対してSDOはMailbox通信により次の二つの方式でODを指定してデータを取得することができます。
- 標準アクセス
任意の
Index,Subindexまで指定して、単一のオブジェクトをSDOとして構成する。CANOpenに準拠したアクセス方法です。- コンプリートアクセス
任意の
Indexのみを指定し、ここにぶらさがる全てのSubindexのオブジェクトを連続したバイトデータとしてSDOを構成します。EtherCAT向けに拡張されたアクセス方法です。
どのサブデバイスも標準アクセスは可能です。コンプリートアクセスが可能かどうかはサブデバイスの仕様によります。SDOをやりとりするMaibox通信が可能なタイミングはPREOP,SAFEOP,OPいずれの状態でも実施することが可能です。
本節では、TwinCAT PLCのファンクションブロックを使ってSDOデータを取得し、コンプリートアクセスで一度に得たバイト配列を、TwinCAT上の構造体データにパースするまでの手順を説明します。