実装例:構造体と共用体を使ったマッピング#
EtherCATのサブデバイスによっては、様々なデータを入出力できるようにバイトデータ型の配列が用意されているものがあります。サブデバイス側のファームウェアの設定やユーザプログラムによりこのエリアを使って自由なデータ型をマッピングする事ができ、TwinCATとデータの送受信が可能です。
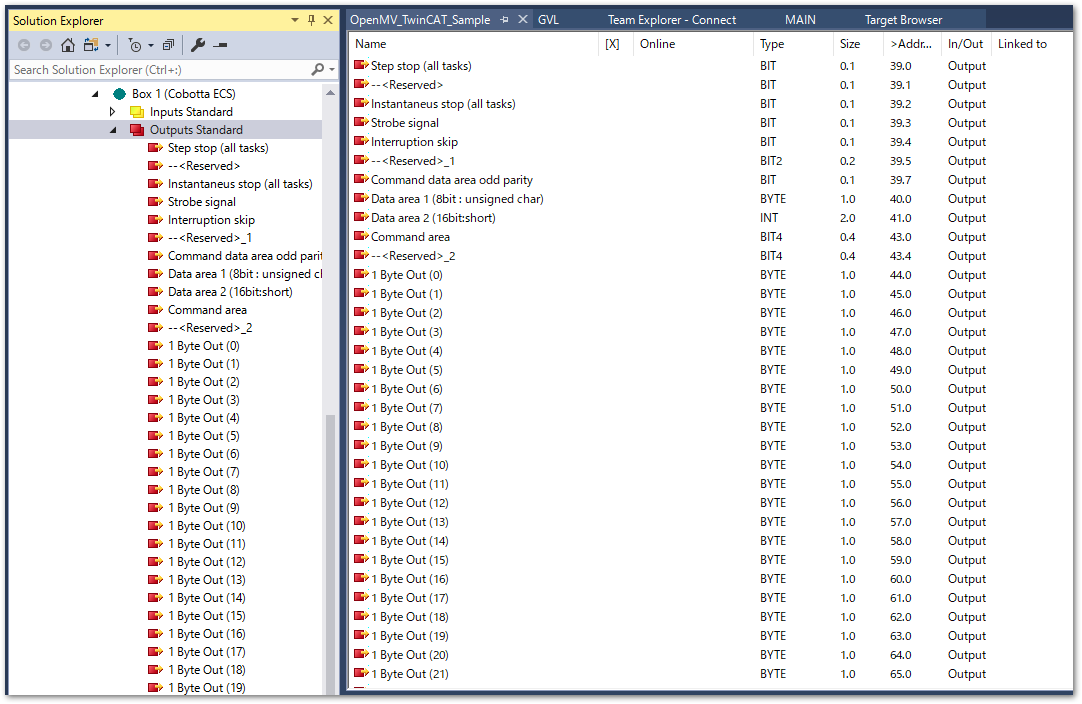
図 7.32 1 Byte Out (n) 以下にバイトデータの配列がアサインされているEtherCATサブデバイス例#
図 7.32はあるデバイスの出力例です。汎用的なバイト型のデータの配列が続き、デバイス側で様々な型のデータにマッピングして受け取ることができます。
変数名 |
型 |
サイズ(Byte) |
1 Byte Out (n) のnへの対応 |
|---|---|---|---|
trigger |
BOOL |
1 |
0 |
axis_x |
REAL |
32 |
1~4 |
axis_y |
REAL |
32 |
5~8 |
axis_z |
REAL |
32 |
9~12 |
本節の例では、表 7.8の通りTwinCATの構造体を定義し、この構造体に値を代入すると、EtherCATのサブデバイスの1 Byte Out (n)エリアに順次マッピングするための構成方法を説明します。
構造体定義と共用体定義#
まずは、表 7.8に示したとおり、cordinates_send_data構造体を定義します。
通信用の構造体なので、メモリアライメント節で説明したとおり{attribute 'pack_mode' := '1'}を加えなければなりません。
{attribute 'pack_mode' := '1'}
TYPE ST_cordinates_send_data :
STRUCT
trigger: BOOL;
axis_x: REAL;
axis_y: REAL;
axis_z: REAL;
END_STRUCT
END_TYPE
Tip
{attribute 'pack_mode' := '1'}を加えなければ8バイトアライメントとなり、その後のREAL型の変数に合わせて1バイト占有するtriggerの変数の後に3バイトの空きが発生します。
つづいて、マッピングするための共用体を定義します。バイト配列の出力用変数には、AT%Q*を指定し、出力変数であることを宣言します。(入力変数として宣言する場合はAT%I*と記述します)
TYPE U_send_data_mapper :
UNION
st_corditnates_send_data : ST_PositionCordinates;
byte_stream AT%Q* : ARRAY [0..12] OF BYTE;
END_UNION
END_TYPE
定義した共用体を、グローバル変数等でインスタンス化します。
{attribute 'qualified_only'}
VAR_GLOBAL
robot_cordinate_send_output: U_send_data_mapper;
END_VAR
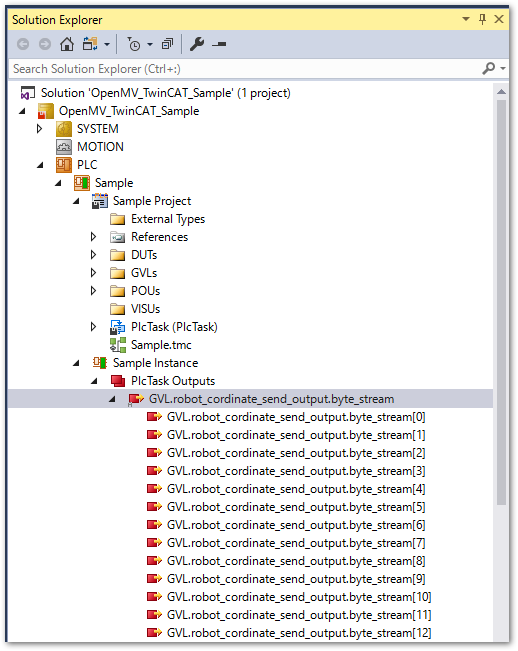
このあとビルドを行うと、次の通り、PLCプロジェクトのInstanceとしてAT%Q*を指定した変数のインスタンスが出来上がります。
EtherCATアドレスへのマッピング#
連続したバイト配列の場合、EtherCATデバイス側からマッピングすることで、マルチリンクが活用できます。これにより13Byteまとめて1回でマッピングが可能となり、1Byteづつマッピングする必要がありません。
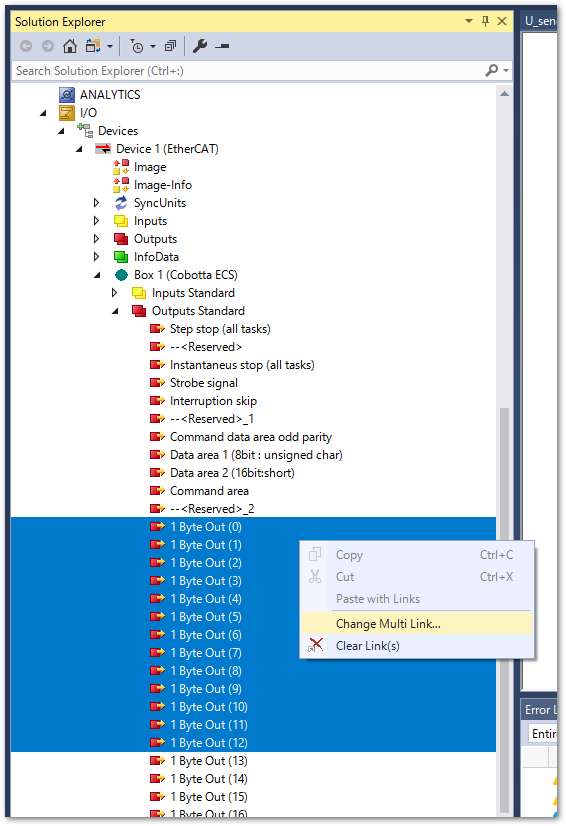
同じサイズのバイト配列分を範囲指定し、コンテキストメニューからChange Multi Link...を選択します。
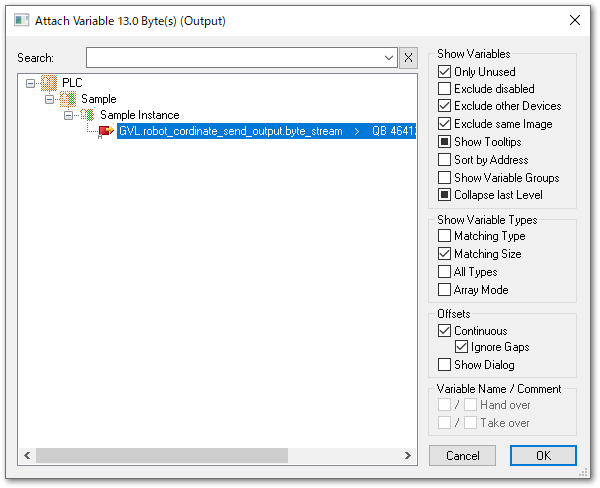
次図の通り、配列変数が一覧されていますので、選択してOKボタンを押します。
これによりプログラム上で作成したグローバル変数GVL.robot_cordinate_send_output.st_corditnates_send_dataの構造体要素にそれぞれのデータを代入することができます。
共用体によりバイトデータとしてシリアライズされ、EtherCATのプロセスデータとしてリアルタイムに相手側へデータ転送することができます。