監視#
これまでの設定を行うことで、監視できる状態になりました。実際に監視を行うためには、次の操作を行います。
CSV収集の開始と終了#
CSVの収集を開始するには、次の手順を実施してください。
PLCへのログイン
TwinCAT Measurement プロジェクトと同じソリューションにあるPLCプロジェクトにおいてリモートPLCへログインします。
TwinCAT Measurement Projectの選択
Visual studioの Solution explorer 上で TwinCAT Measurement Project のどの階層でもよいので選択します。
Scope viewのモニタ開始操作
TwinCAT Measurement Projectの選択を選択すると、ツールバーにScope viewの操作アイコンが現れます。「モニタ開始ボタン」操作を行うと監視を開始します。
StartRecordトリガにより自動的に記録を開始し、以後、CSVExportトリガ毎にCSVファイルを出力します。
Scope viewのモニタ停止操作
Scope viewに記録中においても、次の操作を行う事で操作を停止できます。

警告
停止後、次回モニタを再開するとCSVのファイル名の連番は
1からはじまります。前回のCSVファイルが残っている場合は順次上書きされます。再開前にCSVファイルのバックアップを取ることをおすすめします。
サンプルプログラムを用いたCSV自動出力#
サンプルプログラムでは、次のフローで動作しています。
CSV保存条件プログラム作成に示したPLCプログラムでは、100mm後進動作が完了後の inposition 信号を export_trigger[0] として出力しました。
これを DataPool に登録したものとします。ここでは、つぎの条件でCSVファイルを出力する様に設定してみます。
上記のシーケンスを開始したところからScope viewのモニタを開始する。
export_trigger[0] の立下り条件(つまり、100mm前進動作を開始したタイミング)でCSVを保存する。
このために必要な Channel trigger setは以下の通りです。
StartRecordに追加したchannel trigger:- Release:
Raising Edge
- Threshold:
1
- User Data:
論理軸の
AxisState- 説明:
AxisStateは、軸の動作状態を整数で表現している。1以上で動作開始していることがわかる。
CSVExportに追加したchannel trigger:- Release:
Falling Edge
- Threshold:
1
- User Data:
export_trigger[0]
- 説明:
export_trigger[0] は原点位置における inPosition 信号。動作を開始するとFailとなるため、Falling Edgeにてトリガが発行される。
上記設定にて記録したものは、図 7.20の通りScope viewで一覧できる。この中に示された、CSVExport_*というラベルの部分にてCSVに保存されている事がわかる。
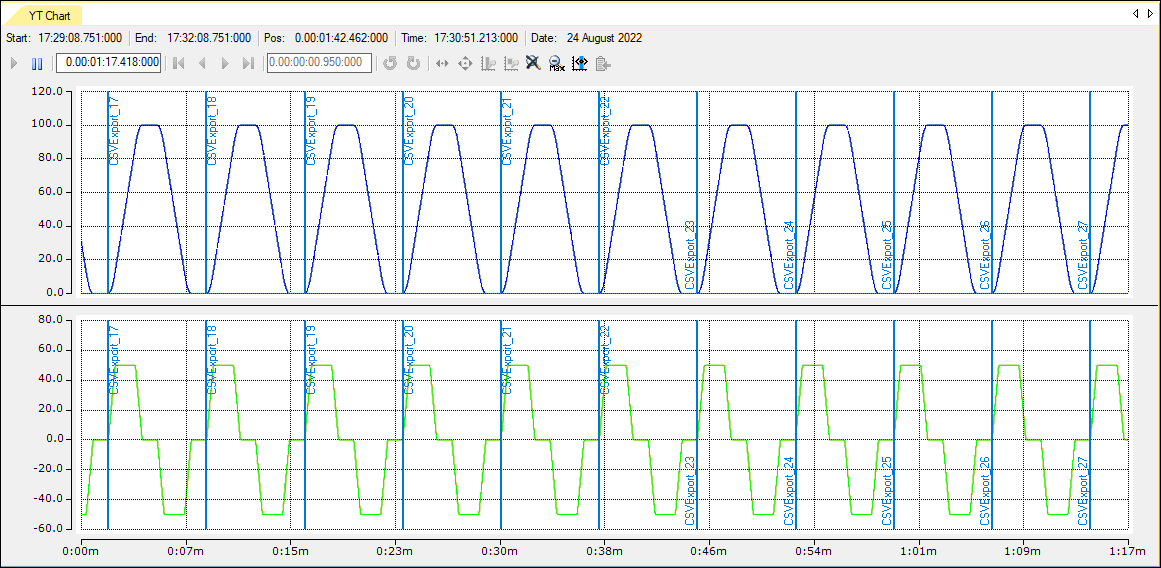
図 7.20 CSVへ出力中のScope view#
CSVファイルは指定のフォルダへ対応する番号をファイル名に含んだ、Export *.csvという名前で順次保存されている。