6.2. 原点復帰#
機能紹介#
通常に使用されているMC_Homeの動作はあらかじめ駆動の仕様が定義されて、その仕様を編集することはできない。このため、Advanced HomingライブラリのFBが用意されて、アプリケーションやユーザーの要望により、異な駆動を組見合わせて原点復帰を実行できる。
システム条件#
Advanced Homingライブラリを使用のためTC3.1 4024.1以降が必要
基本的には下記のBAドライブをサポートする
EL72xx
AX5xxx
AX8xxx
定義されたファンクションブロックの概要#
以下の表では、原点復帰駆動系と完了系に分類している
駆動系 |
完了系 |
|---|---|
MC_StepAbsoluteSwitch/ MC_StepAbsoluteSwitchDetection |
MC_HomeDirect |
MC_StepLimitSwitch/ MC_StepLimitSwitchDetection |
MC_FinishHoming |
MC_StepBlock/ MC_StepBlockDetection/ MC_StepBlockLagBased /MC_StepBlockLagBasedDetection |
MC_AbortHoming |
MC_StepReferencePulse/ MC_StepReferencePulseDetection |
駆動系#
参照の信号を検出するため、原点復帰シーケンスを開始する。参照信号の種類により下記のFBが用意される:
MC_StepAbsoluteSwitch:アブソリュートスイッチやリミットスイッチを検出する原点復帰
MC_StepLimitSwitch:リミットスイッチを検出する
MC_StepBlock:物理のブロックを検出する
MC_StepReferencePulse: エンコーダーのZ相信号を検出する
"Detection"が付いてあるFB(例はMC_StepBlockDetection)は追加で検出された位置データを保存するための出力がある
駆動系のFBを実行すると軸を”Standstill"ステータスから"Homing"に変更する。この駆動系のFBが正常に完了しても軸はこのまま”Homing"状態が残っている。
構成例#
上記の駆動系のFBを組み合わせ、原点復帰手順を作成する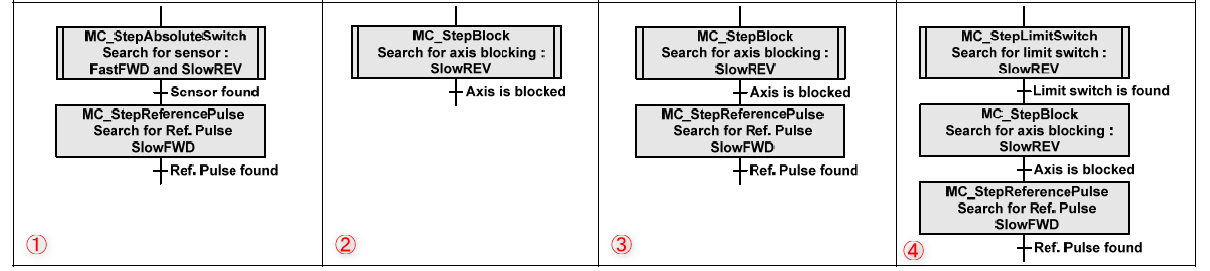 ①:アブソリュートスイッチ→Z相信号検出②:物理のブロックだけ検出③:物理のブロック→Z相信号検出④:リミットスイッチ→ブロック→C相信号の順番で検出する
①:アブソリュートスイッチ→Z相信号検出②:物理のブロックだけ検出③:物理のブロック→Z相信号検出④:リミットスイッチ→ブロック→C相信号の順番で検出する
完了系#
完了系のFBを実行すると原点復帰が完了される。軸は元のステータスに戻る。完了する前にオプションとして駆動の追加ができる
MC_HomeDirect:現在位置を強制に設定する
MC_FinishHoming:追加でRelative移動できる
MC_AbortHoming
環境準備#
ライブラリの追加#
TwinCATの場合、AdvancedHomingのライブラリの名称はTc3_MC2_AdvancedHoming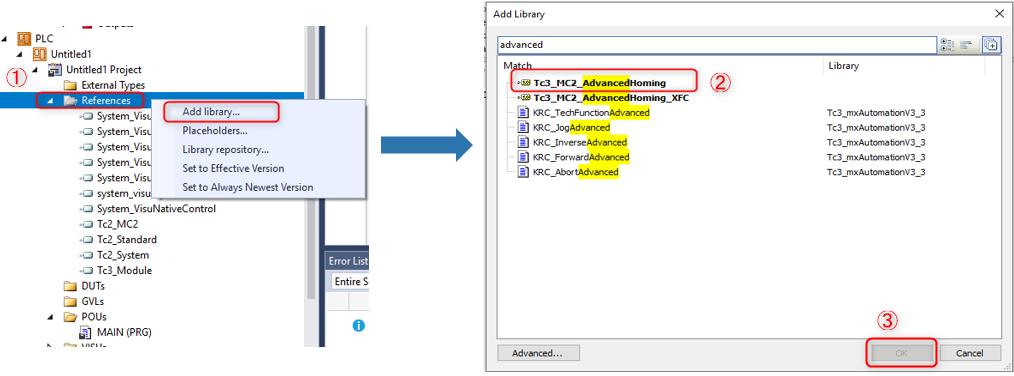 ①Project-Referencesタブを右クリック→Add library…を選択②簡単にAdvancedHomingのキーワードで探し、出た結果を選択→OK
①Project-Referencesタブを右クリック→Add library…を選択②簡単にAdvancedHomingのキーワードで探し、出た結果を選択→OK