MC_StepBlock#
FBについて#
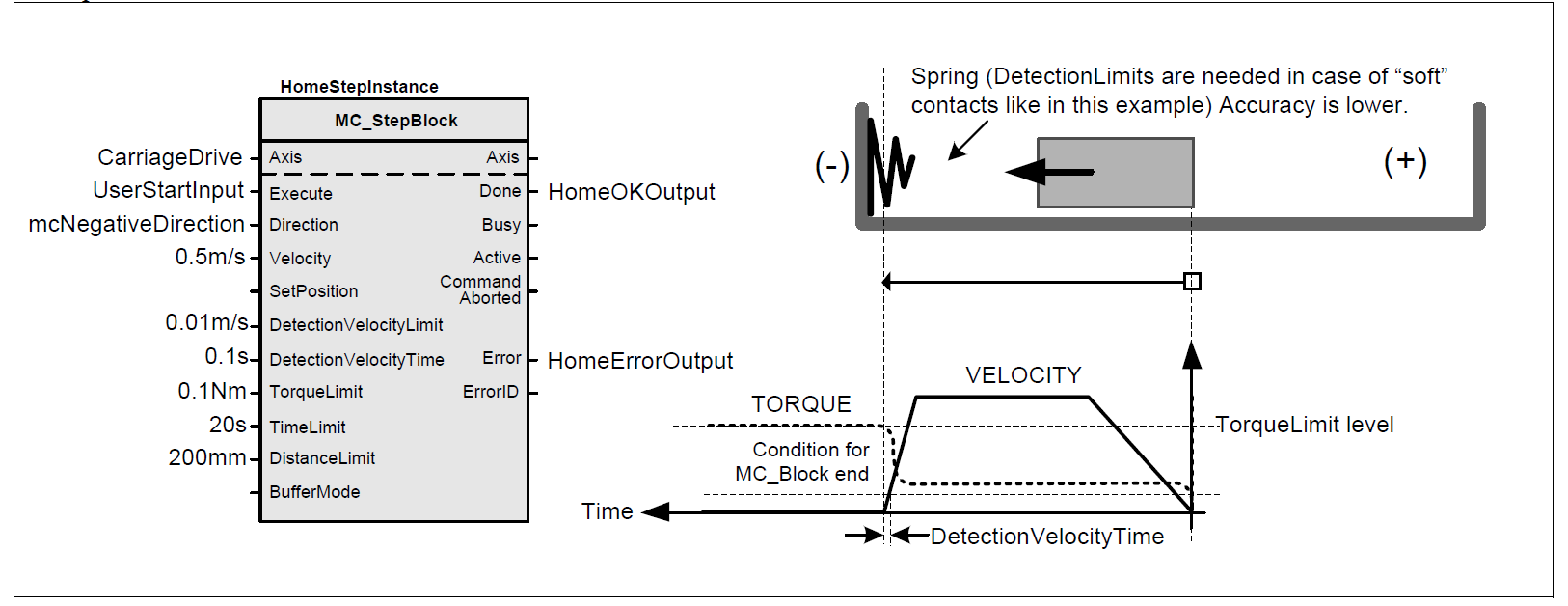
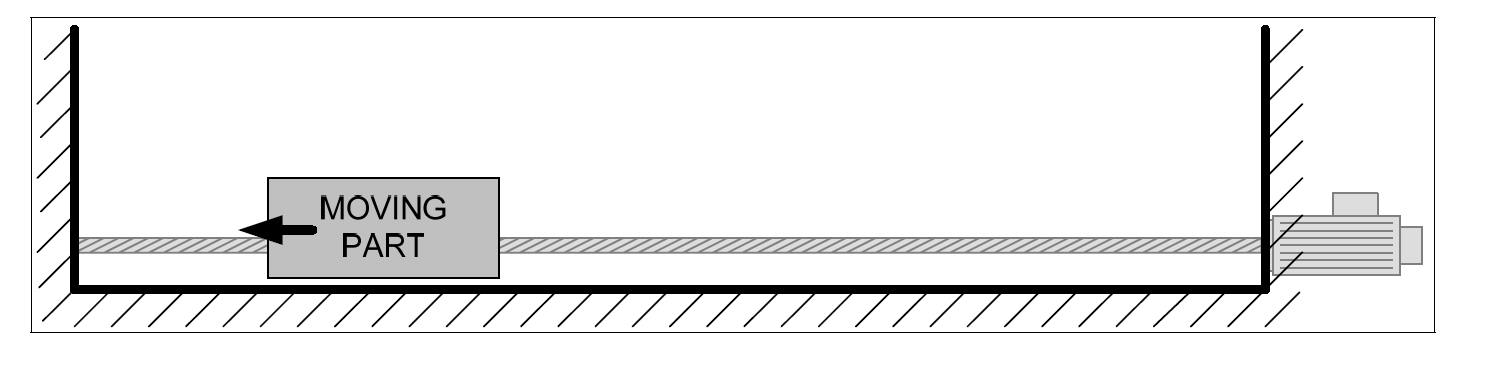 このファンクションブロックは、物理的なオブジェクトに対して原点復帰手順 を実行し、移動を機械的にブロックする。このモードでは、リミットスイッチや基準パルスがない。原点復帰プロセス中に機械的な損傷を与えないためには、適切なトルク制限が必要。
このファンクションブロックは、物理的なオブジェクトに対して原点復帰手順 を実行し、移動を機械的にブロックする。このモードでは、リミットスイッチや基準パルスがない。原点復帰プロセス中に機械的な損傷を与えないためには、適切なトルク制限が必要。
MC_StepBlock完了の条件は2つあり:
トルクリミットに達すこと
実際の速度が、少なくとも’DetectionVelocityTime’の間’DetectionVelocityLimit’ 入力の値を下回ったこと
MC_StepBlockを実行すると
Axis.Status.Homingと.HomingBusyがTRUEになる
論理軸のPosition Monitor,Software Limits,Torque limit機能が無効される
MC_StepBlockを実行完了すると
Axis.Status.HomingがFALSEになり、 FBの出力信号DoneがTRUEになる
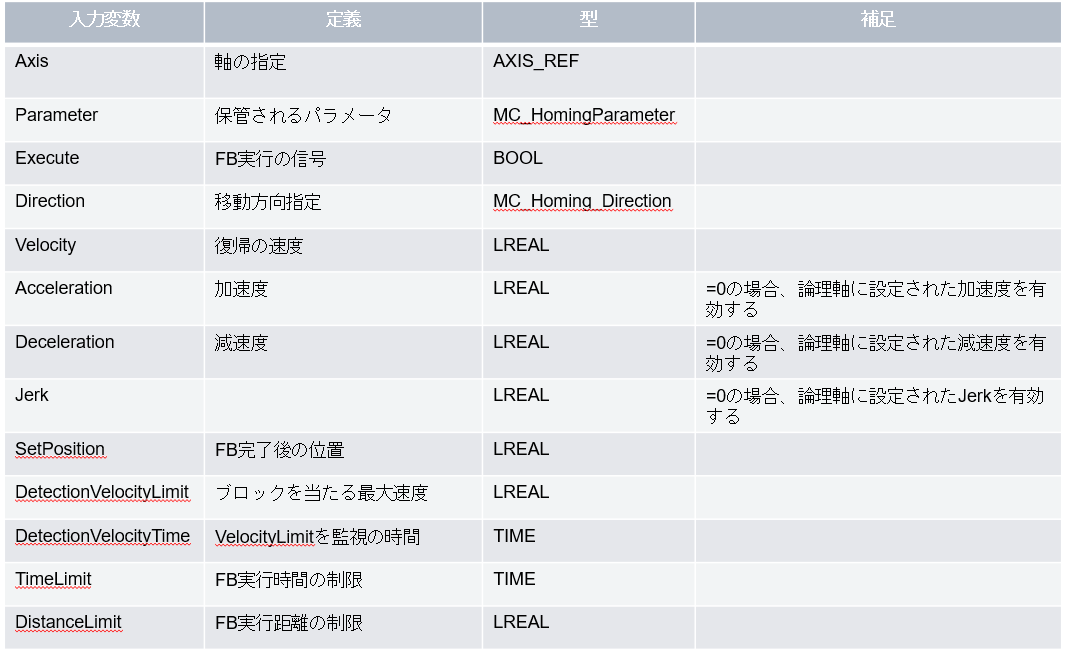
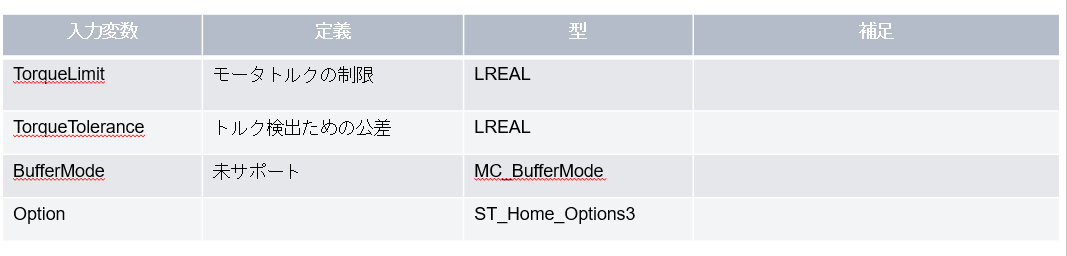
FBの入力#
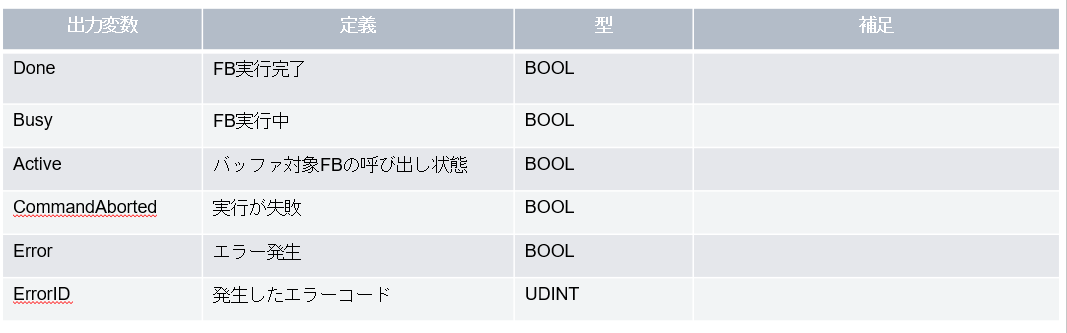
FBの出力#
環境準備#
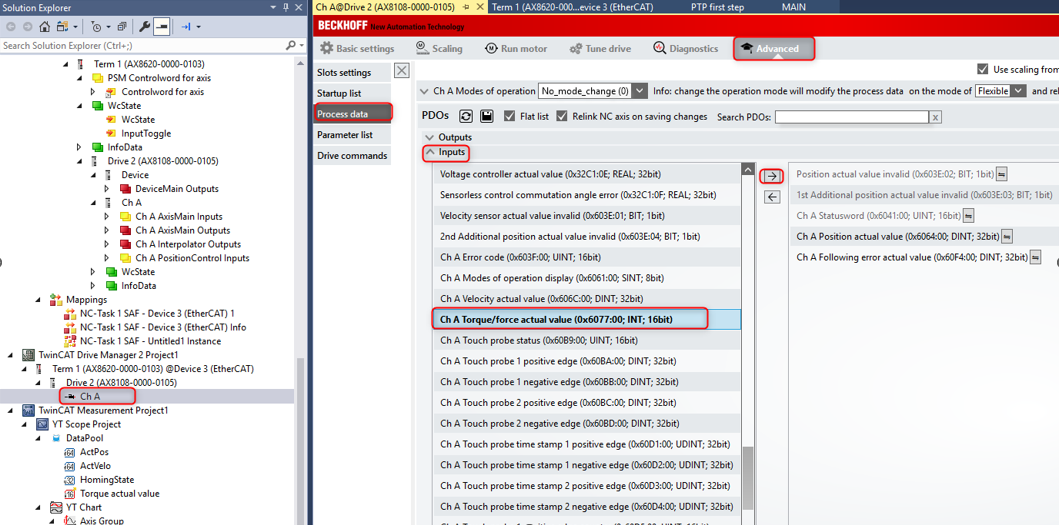
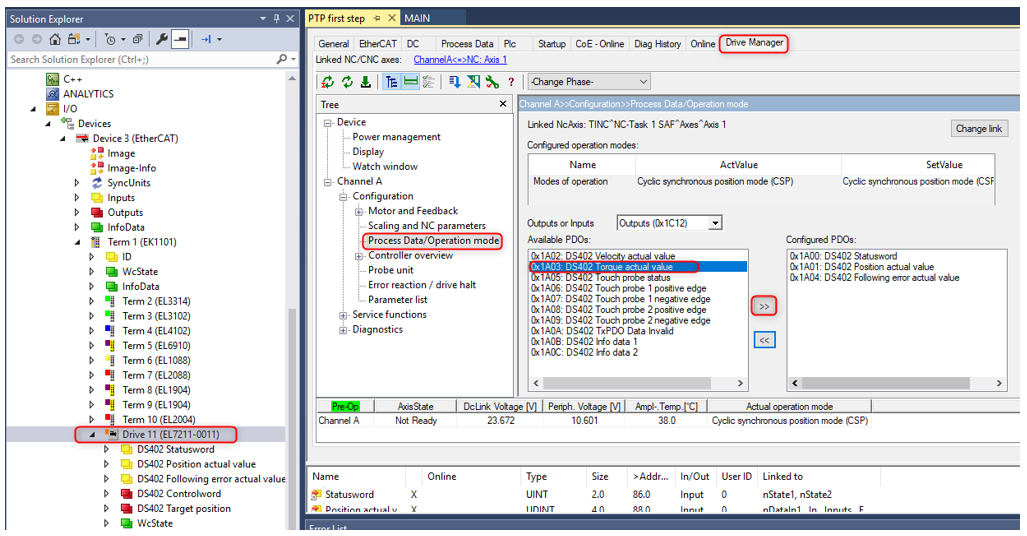
PDOマッピング#
トルクを監視するため実際トルク値のPDOをマッピングする必要がある。基本的には「Torque Actual Value」というオブジェクト
AX8xxxの場合
EL72xxの場合
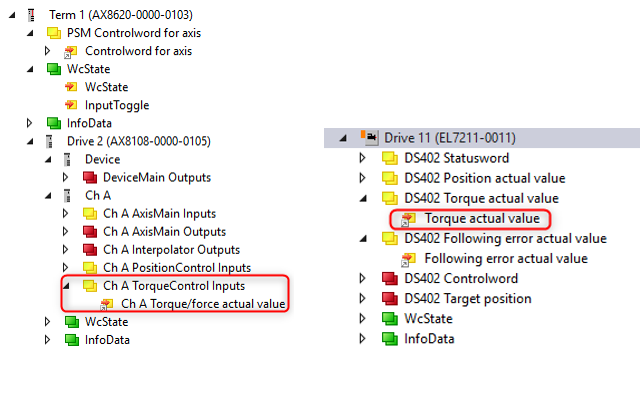
追加したPDOのマッピング状態を確認する論理軸にリンクがない場合、手動で論理軸とドライブのリンク外してから、再度リンクする
一例#